
里,轴与轴之间是靠机构来传动的,例如下图所示,主/从轴间以一条平皮带相连,当主轴开始转动,从轴也一起转动!假设主/从轴的轮径相同,并在轮上都做一个∇标记,初始的位置都在正上方,经过一段时间的运转后,由于皮带的打滑,主/从轴轮径误差等诸多因素,发现主/从轴上的标记∇位置不一样了!表示主轴与从轴的相位偏移了!
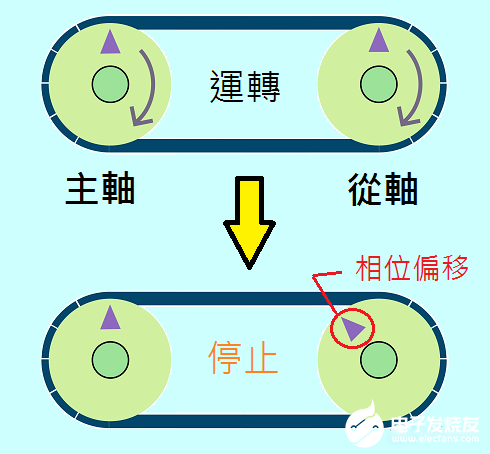
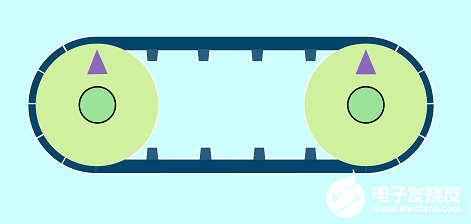
如果只是单纯用来传输动力(例如引擎中的发电机皮带),相位的偏移并无关係;但若作为同步的控制(例如引擎中控制汽门,曲轴与点火时机的皮带),就会发生问题!以机构而言,要避免相位偏移,可 以把一般的皮带换成正时皮带(Timing Belt)跟齿轮!如下图所示,即使长时间运转,主/从轴的相位都能维持一致!就是彼此达到同步状态!
讲了这么多,终于能进入正题了!如果把上述的物理运动改成伺服的电子凸轮,效果会是如何呢?如下图三,我们将皮带拆除,用编码器采集主轴的位置,以A/B相脉波的方式传给伺服,伺服以直线的电子凸轮来驱动从轴做跟随:
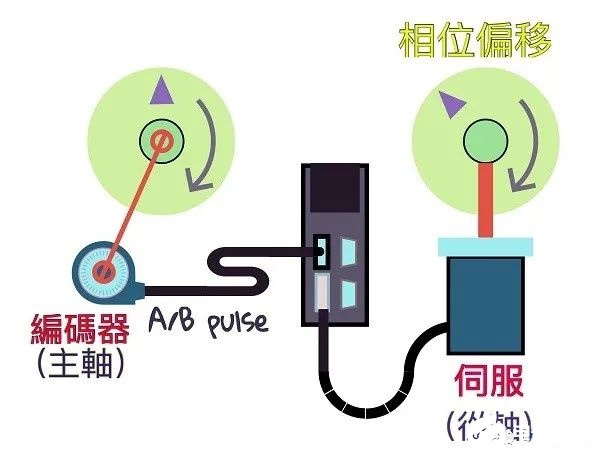
实测结果发现,相位发生了偏移,因为编码器的脉波受到干扰,而且会随时间累积,造成偏移愈趋明显!而脉波干扰是很难完全抑制的,在工厂多变的环境下,不论配线如何讲究,脉波偏差总会发生,只是时间早晚的问题!因此,单纯以编码器脉波驱动电子凸轮,无法达到正时皮带的同步效果,顶多是平皮带的效果而已!
那么该怎么改善呢?其实我们大家可以效法正时皮带,因为它是带"齿"的,所以不会滑动造成累积误差!那我们就用一个假想的"齿"来模彷它!并把齿的宽度(就是齿与齿的距离)定义清楚,这样就可以造出一个虚拟的正时皮带,是所谓的”同步轴”!这个"齿"可以用主轴上任何一个周期性出现的信号(或编码器的Z)来表示,如下图:
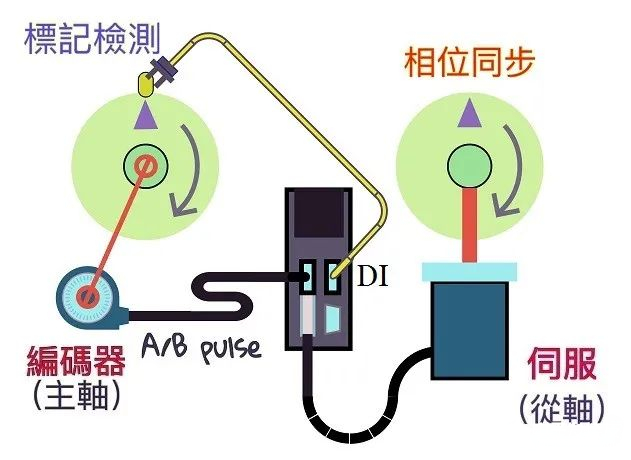
在主轴上安装一个标记当作"齿",并用感测器将信号读进伺服的DI,再根据编码器的型号得知主轴转一圈应该会有R个脉波。由于一圈只有一个齿,所以齿的宽度就是R(单位是主轴的脉波)。如此,只要伺服每感测到一个"齿",就知道应该要收到R个脉波,如果数量不对,就可加以补偿,让脉波总数一直跟齿数维持正确的关系,如此便可让主/从轴的相位永不偏移,保持同步!这功能在台达ASD-A2 与 ASD-M-R伺服里都已具备,在凸轮的主轴来源 P5-88.Y里,选择实体脉波相当于使用平皮带;选用同步轴就等于使用正时皮带,十分便捷!设定方式请参考 A2凸轮同步轴的设定方法!
1,采用虚拟主轴 不会漏脉波,但是主轴也一定要使用伺服马达,无法采用一般马达外加编码器的方式!
2,利用凸轮对位 虽能做到,但通常会保留给 从轴的修正使用,因为从轴的误差补偿会用到!
轴位置传感器与PCM连接电路如图所示。当诊断仪显示故障码DTCP0340时,说明传感器出现了故障,应进行检修。其检验测试的数据如下表所示。欢迎转载,信息维库
轴位置传感器标准波形福特车正常波形如图2所示。红旗轿车正常信号波形如图3所示。图2 福特轿车
呢?由浩辰CAD软件公司研发的浩辰3D制图软件中为用户更好的提供了专业的工程参考,使用工程参考工具来设计专门的特征,如轴、齿轮
机构的结构、特点、类型及应用; 2.从动件的常用运动规律及其选择; 3.用图解法绘制
机构进行实用设计。釆用电流环、速度环的双闭环策略控制电极位置和速度。用先进的空间矢量脉宽调制控制算法对参数进行反复优化,使侗服系统达到吏好的效果和更高的性价比。
电机驱动的方式有脉冲式、模拟量式、总线式(canopen/Ethnet)。首先,目前的需求是利用MCU+FPGA+旋转编码器
设计之数学基础设计 /
比系统组成 /
何作用 /
vscode-theme-generator VS Code主题生成工具库
拆解防狼神器,看看内部构造和原理,遇上坏人用这个能有用吗? #硬核拆解
18万人购买的抖音爆款水龙头,评测试用后拆开看看到底值不值 #硬核拆解
挑战无损拆开小米随身手电筒,研究明白内部结构后再无损装回去 #硬核拆解
